Control System
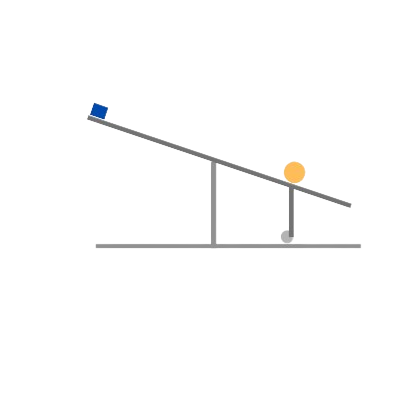
PID: Beam and ball balance
A demonstration of ball and beam experiment.
Auto PID: DC Motor Position control
Autotuning PID loop for DC motor position control, using a low-cost quadrature encoder for closed-loop feedback.
FOC based BLDC position control
A BLDC motor driver implements field-oriented control (FOC) to achieve
high-precision
position control.
(Work in progress)
ROS2
Generative Art [*.p5js]